1.3m Unitree G1 Perfect Layup! HKUST Unveils World’s First Real Basketball Robot Demo
Robot Basketball Breakthrough: Unitree G1 Executes Real-World Layup
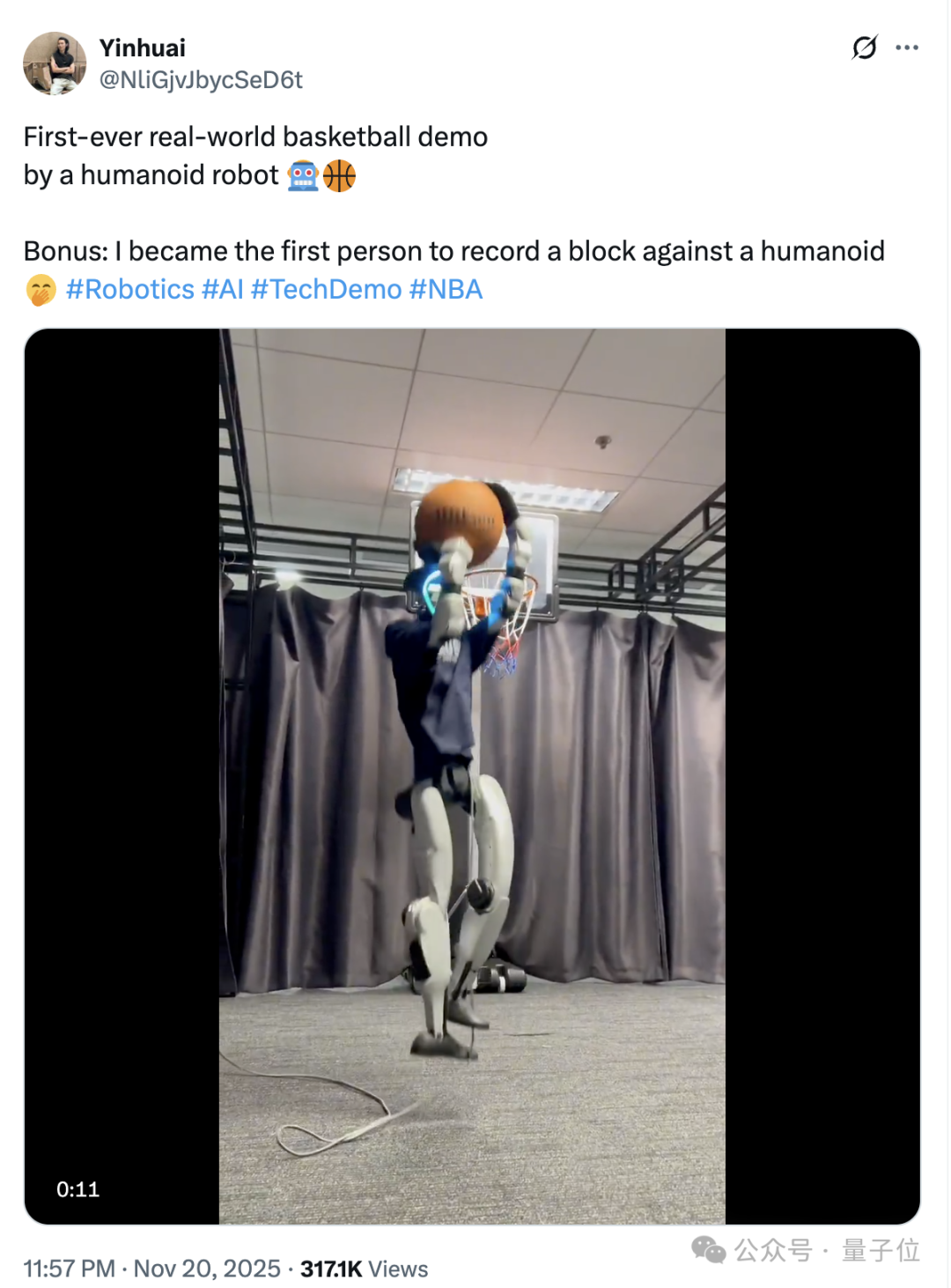
A 1.3-meter-tall “Little Potato” Unitree G1 robot can now perform a smooth three-step basketball layup — in the real world.
While it’s not about to enter the NBA draft, this feat brings the robot closer to dominating rural “village BA” games.
> This marks the world’s first robot capable of completing basketball gameplay actions in a real environment, achieved by researchers at The Hong Kong University of Science and Technology (HKUST).
---
From Simulation to Reality
The team hasn’t yet released detailed specs, but based on prior work, the breakthrough builds upon earlier robot basketball skills with major enhancements.
Accepted at SIGGRAPH 2025:
SkillMimic-V2: Learning Robust and Generalizable Interaction Skills from Sparse and Noisy Demonstrations
---
Core Problem Addressed
Challenge in RL from Interaction Demonstrations (RLID):
Real-world human–robot interaction data is often:
- Sparse: Skills lack variation and transitions.
- Disconnected: No natural linkage between skill segments.
- Noisy: Contains physically impossible states and artifacts (e.g., clipping, incorrect contact positions).
These data flaws hinder skill mastery and task robustness.
---
SkillMimic-V2 Innovations
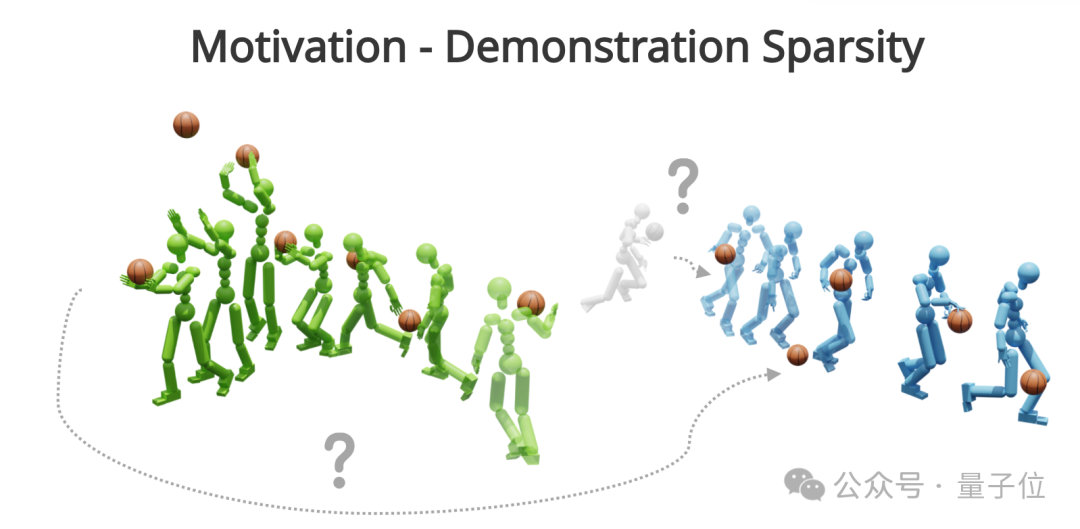
Core Idea: Even noisy, sparse demonstrations imply many physically feasible trajectories that can bridge missing transitions and enhance skill range.
Three Key Components:
- Stitched Trajectory Graph (STG)
- Finds and links similar states across different skill demonstrations.
- Adds connections between skills via masked transitional frames.
- Enables learning of missing skill transitions (e.g., dribble → shoot).
- State Transition Field (STF)
- Starts training from randomly sampled states near reference trajectories.
- Inserts masked states when far from the target to let the policy learn recovery dynamics.
- Creates a recovery-capable state space.
- Adaptive Trajectory Sampling (ATS)
- Dynamically adjusts sampling probability based on the difficulty of segments.
- Harder segments (low reward) are sampled more often.
- Prevents early failure from breaking long task sequences.
---
Performance Gains
In Isaac Gym simulation:
- Robot successfully performs layups under disturbance.
- Smooth transitions between dribbling and shooting.
Results vs. previous state-of-the-art (SkillMimic):
| Metric | SkillMimic | SkillMimic-V2 |
|-----------------------------|------------|---------------|
| Layup success rate | 0% | 91.5% |
| Task Switching Success Rate | 2.1% | 94.9% |

---
Predecessor: SkillMimic (CVPR 2025 Highlight)
Goal: Master physics-based Human–Object Interaction (HOI) skills without tedious handcrafted rewards.
Key Innovations:
- Unified HOI Imitation Reward — trains multiple skills under one reward configuration.
- Contact Graph — captures precise contact relationships across body parts and objects.
- Hierarchical Skill Reuse — low-level skills reused by high-level controllers for complex tasks.
Pipeline:
- Data Collection — real basketball skill demonstrations.
- Low-Level Training — imitate HOI data to learn skills.
- High-Level Training — combine and reuse skills for continuous task sequences.

Datasets:
- BallPlay-V — video-based estimation (~35 min data).
- BallPlay-M — optical motion capture (high accuracy).
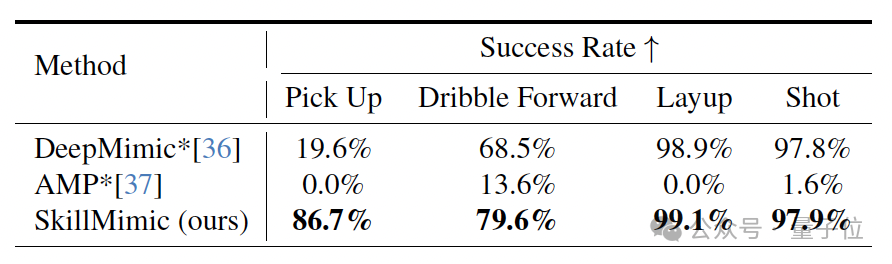
Result: Higher skill mastery than DeepMimic & AMP, learning dribbling, layup, and shooting with one unified setup.
---
Early Roots: PhysHOI (2023)
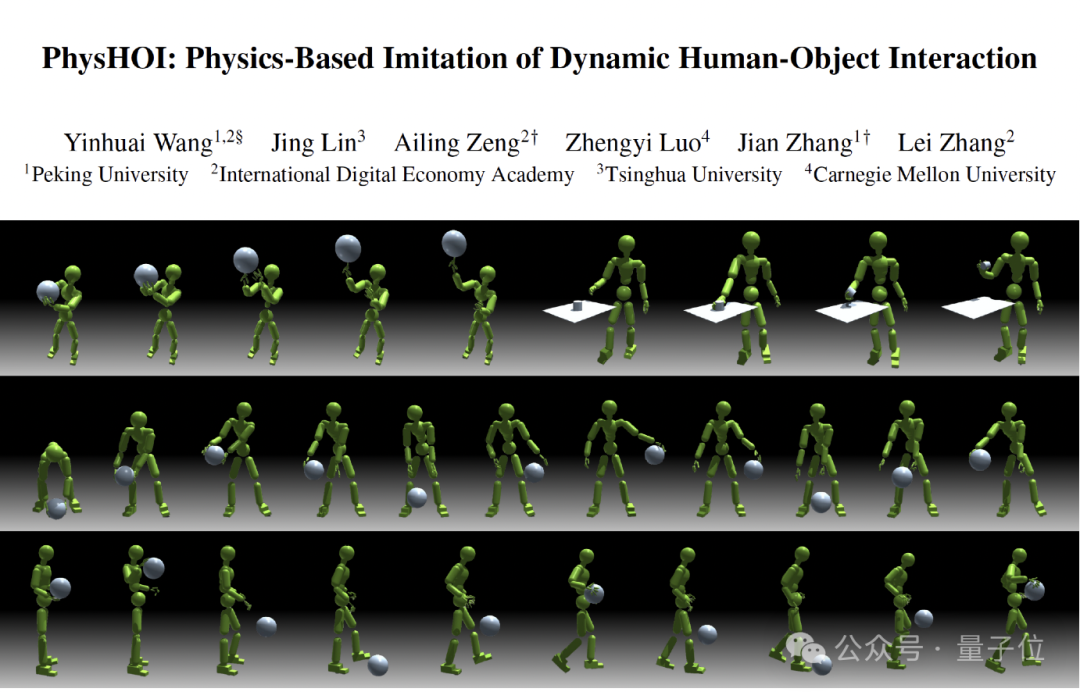
PhysHOI: Physics-based imitation learning for dynamic HOI.
Method:
- Input: Current simulated HOI state + reference HOI state.
- Output: Actions → physics simulator → next state.
- Optimized with kinematic rewards + contact–grasp rewards.
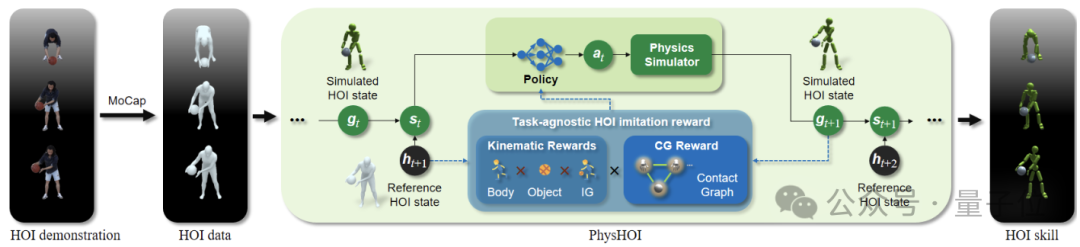
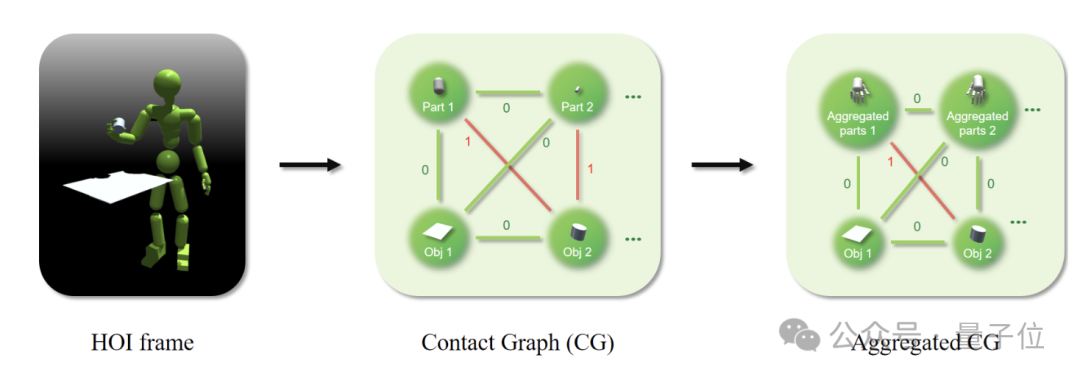
Also features:
- Contact Graph — aggregates body part–object contact info.
- BallPlay Dataset — full-body basketball demonstrations.
Notable Outcome: Robust performance regardless of ball size.
---
Lead Researcher Spotlight: Wang Yinhui

Key contributor across PhysHOI, SkillMimic, and SkillMimic-V2 — nicknamed “Number One Basketball Researcher” by netizens.
- PhD Year 2 at HKUST under Prof. Tan Ping
- MSc: Peking University
- BSc: Xidian University
- Internships: IDEA Research, Unitree Robotics, Shanghai AI Lab
From 2023 simulations to real-world robot basketball in 2025, progress accelerated by improved robot hardware.

---
Connecting Robotics with AI-Creation
Platforms like AiToEarn官网 let researchers publish and monetize AI-generated technical content globally.
- Cross-platform publishing: Douyin, Kwai, WeChat, Bilibili, Xiaohongshu, Facebook, Instagram, LinkedIn, Threads, YouTube, Pinterest, X/Twitter.
- Analytics & Ranking: discover top AI models relevant to robotics and RL.
- Docs: AiToEarn文档
- Model Rankings: AI模型排名
For projects like PhysHOI or SkillMimic-V2, such tools could streamline sharing results, videos, and interactive simulations to multiple audiences — while sustaining research monetization.
---
References
- https://x.com/NliGjvJbycSeD6t/status/1991536374097559785
- https://wyhuai.github.io/info/
- https://ingrid789.github.io/SkillMimicV2/
- https://wyhuai.github.io/physhoi-page/
- https://ingrid789.github.io/SkillMimic/