AutoNavi Lane-Level Maps: A Technological Leap from Perceptual Intelligence to Spatial Intelligence
Gaode’s Commitment: Building a Digital Road for Safer, Smarter, and More Enjoyable Transportation
Gaode will continue to deeply cultivate technology, striving to make precise and dynamic “road omniscient views” benefit every vehicle and every trip, paving a solid digital foundation for humanity’s journey toward a safer, more efficient, and more enjoyable intelligent transportation future.

---
Lane-Level Maps: Unlocking Precise Navigation and New Scenarios for Intelligent Driving
As a national-level APP, Gaode Map aims to provide users with an integrated travel and lifestyle experience — our biggest vision. In the constantly changing traffic environment, “Which lane should I take?” used to be a common frustration for drivers.
Gaode breaks this problem with lane-level navigation technology — not only bringing mobile and in-car navigation into the sub-meter precision era, but also becoming a key digital foundation for advanced driver-assistance systems (ADAS) and autonomous driving.
Mobile / In-car Navigation Revolution: Goodbye to “rough directions” — we now have lane-level precision guidance. In complex intersections, highway ramps, or tidal lanes, users can clearly know their current lane and which lane to enter next, greatly reducing decision pressure, improving travel efficiency, and enhancing safety.
ADAS “Intelligent Eyes”: For L2+ ADAS functions (such as lane-level cruise, automatic lane change, highway NOA), Gaode provides high-accuracy, high-freshness prior information about road structures — core inputs for precise vehicle positioning, environment understanding, and path planning — improving reliability and comfort.
The Foundation of Autonomous Driving: For more advanced autonomous driving, lane-level maps are the indispensable “memory” and “knowledge base,” offering beyond-visual-range road topologies, traffic rules, and dynamic information predictions — the underlying guarantee of safe, efficient, and compliant driving.

---
Gaode Lane-Level Map Development History: A Tech-Driven Epic of Map Evolution
The development of Gaode’s lane-level maps is an epic story of tech innovation driving large-scale application and cost optimization:
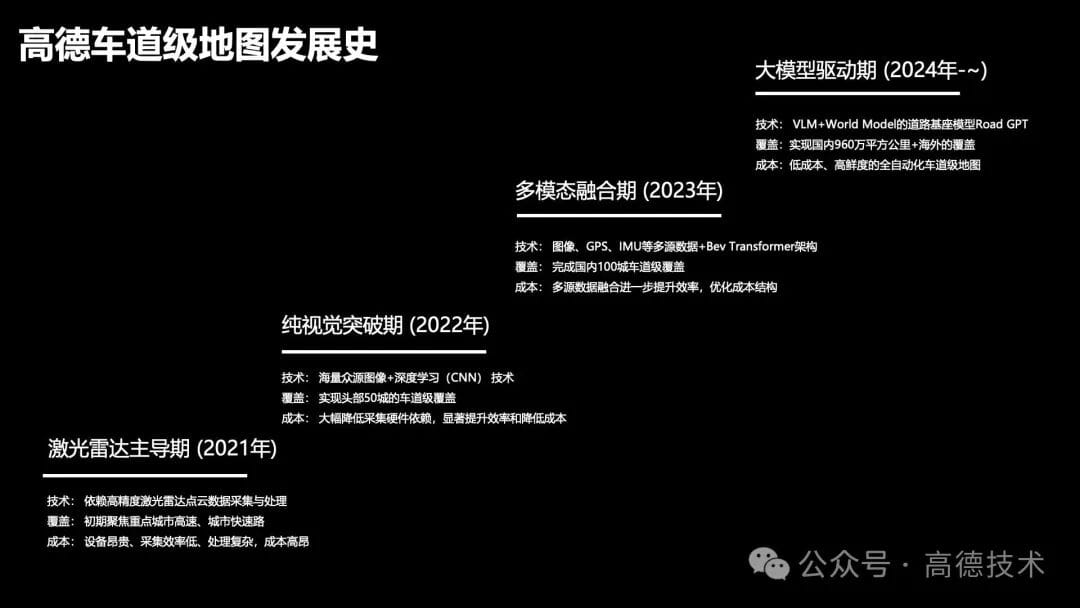
- LiDAR Dominance Period (2021)
- Technology: Relied on high-precision LiDAR point cloud data collection and processing
- Coverage: Initially focused on highways and urban expressways in key cities
- Cost: Low collection efficiency, complex processing, high costs
- Pure Vision Breakthrough Period (2022)
- Technology: Massive crowd-sourced images + deep learning (CNN) to recognize and vectorize lane markings and traffic signs
- Coverage: Achieved lane-level coverage in the top 50 cities
- Cost: Significantly reduced hardware dependency, boosted efficiency, lowered costs
- Multi-Modal Fusion Period (2023)
- Technology: Fused images, GPS tracks, IMU, and other heterogeneous data + BEV Transformer architecture, utilizing attention mechanisms to better understand complex road scene context, improving accuracy and robustness
- Coverage: Completed lane-level coverage for 100 cities nationwide
- Cost: Multi-source data fusion further improved efficiency and optimized cost structure
- Multi-Modal Large Model Driven Period (2024–Now)
- Technology: In the era represented by RoadGPT and other multi-modal large models, achieving end-to-end, smarter, more efficient map construction and updates
- Coverage: Covering 9.6 million km² domestically plus overseas regions
- Cost: Low-cost, high-freshness, fully automated lane-level maps
---
As transportation continues to integrate AI and big data, such lane-level innovations not only enhance safety and driving ease for everyday users, but also lay the groundwork for the next leap in intelligent mobility. In fact, similar advancements are happening in content creation — platforms like AiToEarn官网 provide open-source, global AI monetization infrastructure that enables creators to generate, publish, and earn across multiple platforms simultaneously, connecting AI generation with analytics and model rankings. Just as lane-level maps unify critical driving information for vehicles, tools like AiToEarn unify multi-platform publishing for creators, raising both efficiency and reach.
RoadGPT: Lane-Level Maps Enter the Era of End-to-End Multi-Modal Large Models
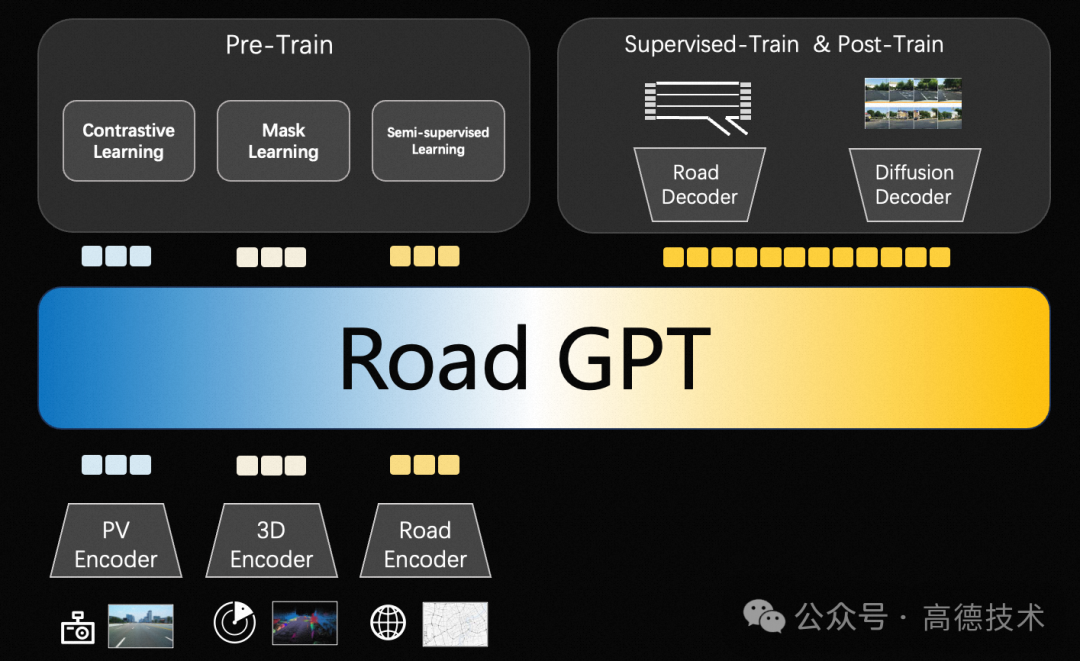
RoadGPT is a multi-modal, end-to-end map generation foundational model independently developed by AutoNavi (Gaode), marking the beginning of a new era of intelligent lane-level mapping technology.
---
Core Concepts
- Unified Multi-Modal Encoder: Maps multi-source heterogeneous data — images, point clouds, trajectories, text — into a unified semantic space.
- Multi-Task Pre-Training (Pre-Train):
- Understanding Tasks: Fundamental map construction tasks including road topology generation, lane line detection, traffic element recognition, and SD association.
- Generation Tasks: Achieves better semantic-level alignment of different modalities through objectives such as contrastive learning and cross-modal reconstruction (e.g., reconstructing images from lane lines).
- Other Auxiliary Tasks: Includes image caption generation, trajectory prediction, and modality contrastive learning, enhancing the model’s depth of scene understanding.
- Supervised Training (Supervised-Train):
- Alignment Tasks: Uses expert-labeled road data for supervised fine-tuning, ensuring model outputs align with expert mapping processes.
- Post-Training Fine-Tuning (Post-Train):
- Reinforcement Learning (GRPO): Introduces rewards for map formatting and aesthetics to reduce logical errors and improve visual quality.
- Continuous Learning: Supports online learning to quickly absorb new data, adapt to road changes, and enable high-frequency map updates.
---
Industry Technology Leadership: Continuous Innovation Driving Academic Progress
AutoNavi has been investing consistently in lane-level mapping and related AI fields, producing internationally influential research outcomes. For example, in the past year:
- [CVPR’25 Highlight] Driving by the Rules: A Benchmark for Integrating Traffic Sign Regulations into Vectorized HD Maps
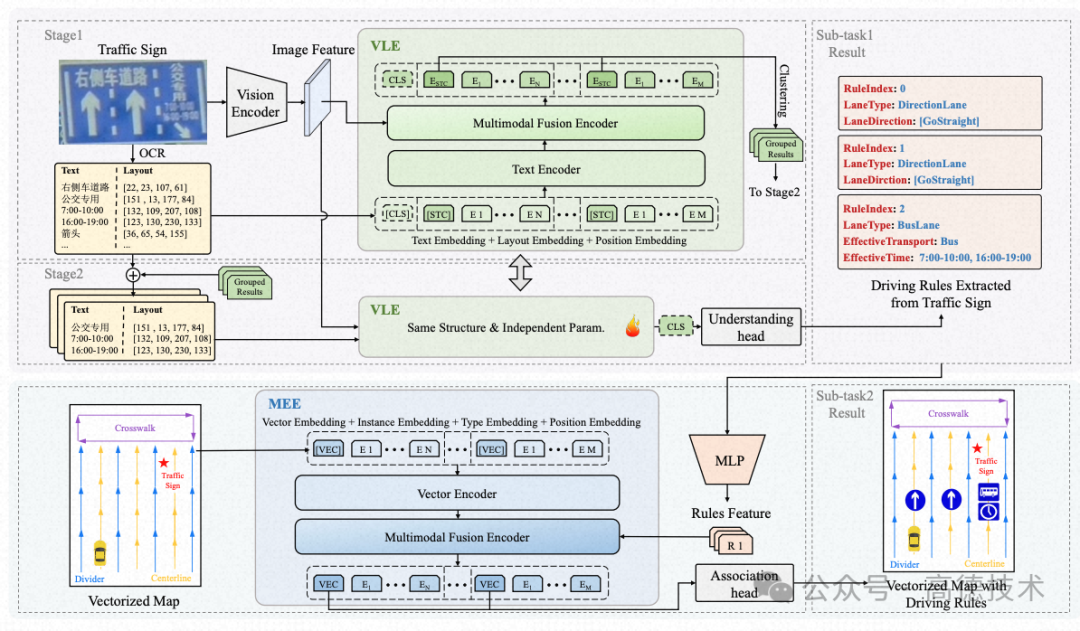
To address the limitations of current online mapping methods that overlook traffic rules — restricting autonomous driving systems from being fully "online" — we believe that fully understanding rules from traffic signs requires accomplishing two core tasks: rule extraction and rule-to-lane association.
We created MapDR, the first large-scale benchmark dataset (covering over 10,000 real-world scenes and 18,000 structured rules), defined a new task and evaluation metric for integrating traffic rules into online maps, and provided strong baselines: a modular approach (VLE-MEE) and an end-to-end approach (RuleVLM), aiming to fill a critical research gap in the field.
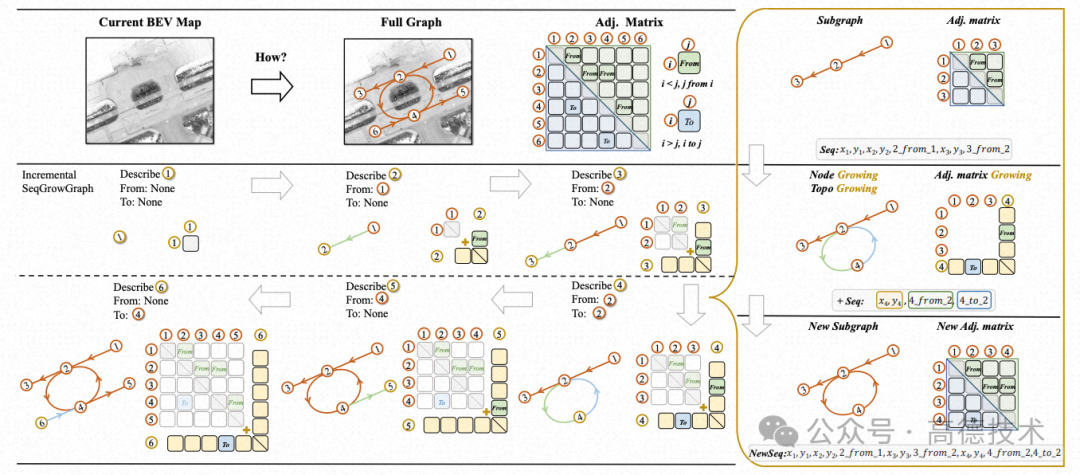
- [ICCV’25] SeqGrowGraph: Learning Lane Topology as a Chain of Graph Expansions
---
In the evolving ecosystem of intelligent mapping, models like RoadGPT not only push ahead in multi-modal AI understanding but also connect with broader innovations in AI-powered content generation and distribution. Open-source platforms such as AiToEarn官网 provide creators and developers with tools to generate, publish, and monetize AI-driven content across major platforms — from Douyin and Bilibili to YouTube and LinkedIn — with unified analytics and model ranking (AI模型排名). As continuous learning and cross-domain intelligence become essential, the synergy between mapping AI and global content AI ecosystems will only deepen, enabling both technical research and creative applications to thrive simultaneously.
Addressing Complex Lane Topologies: SeqGrowGraph Framework
To tackle the challenge that existing methods face in handling complex lane topologies such as loops, we propose the SeqGrowGraph framework. This approach mimics the way humans draw maps, modeling lane graph construction as a step-by-step expansion sequence. The method autoregressively predicts incremental updates to the adjacency matrix and geometry matrix, introducing new nodes and their connections at each step. This enables flexible representation of complex road structures, including loops and bidirectional lanes.
---
【NeurIPS'25 SpotLight】FutureSightDrive: Thinking Visually with Spatio-Temporal CoT for Autonomous Driving
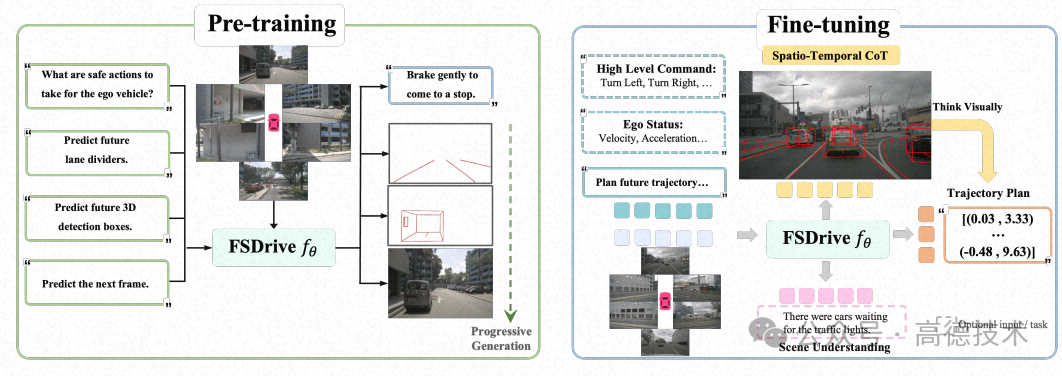
Current autonomous driving models often rely on text-based chain-of-thought reasoning (CoT), which can lead to the loss of fine-grained spatiotemporal information. We introduce FutureSightDrive, a framework that encourages models to “think visually” through a novel Spatio-Temporal CoT. In this method, a Vision-Language Model (VLM) first acts like a world model, generating a unified future image containing predicted lane lines and 3D objects as an intermediate visual reasoning step. The model then plans the driving trajectory based on both the current observation and the future prediction. This represents a step toward end-to-end visual reasoning in autonomous driving, closer to human cognitive processes.
---
【AAAI26-Under Review】Persistent Autoregressive Mapping with Traffic Rules for Autonomous Driving
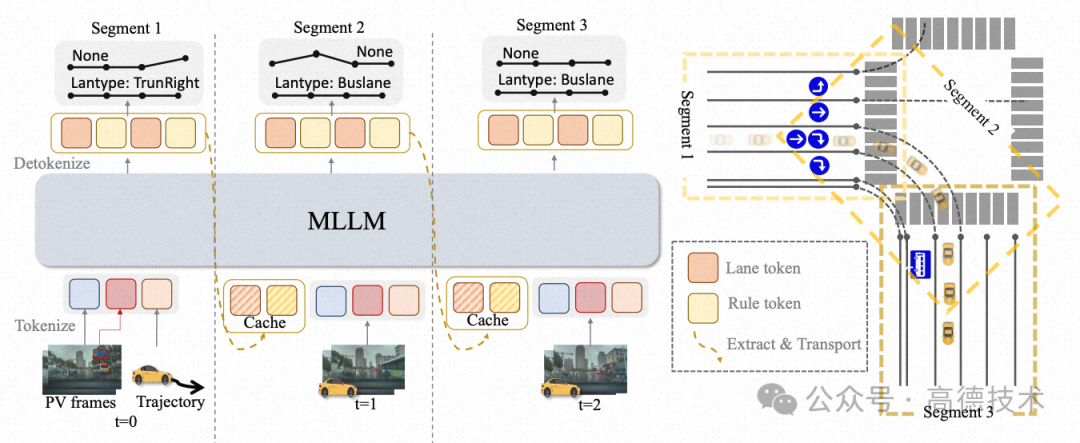
To address the safety risk in autonomous driving systems where traffic signs are “forgotten immediately after seeing,” we propose PAMR — Persistent Autoregressive Mapping with Traffic Rules. This framework integrates two core mechanisms:
- Map-Rule Co-Construction — jointly autoregressively building lane geometry and traffic rule understanding.
- Map-Rule Cache — preserving and seamlessly transferring rule information across continuous driving segments.
PAMR empowers autonomous driving systems with persistent compliance to traffic regulations, ensuring that even after passing a sign, the vehicle continues to “drive by the rules.” This notably enhances the safety and reliability of driving decisions.
---
The Future is Here: Building a Dynamic, Intelligent, Ubiquitous Spatial Intelligence Foundation
---
Product Perspective
- Global Real-Time “Live” Maps: Achieving full coverage of lane-level maps across China and core international regions, maintained with “full coverage, high freshness, low cost,” supporting updates within minutes or even seconds.
- Dynamic Map Services: Deep integration of real-time traffic events, weather effects, road works, and predictive information (e.g., congestion propagation), providing “foreknowledge-level” navigation services for mobile and in-vehicle systems as well as driver assistance.
- Car-Road-Cloud Coordination Hub: Serving as the core link between vehicle perception and cloud intelligence, empowering advanced cooperative perception, decision-making, and control, thereby improving the safety and efficiency of the overall traffic system.
---
Technical Perspective
- RoadGPT Continuous Evolution: Advancing toward larger-scale parameters, stronger multimodal understanding and generation abilities, and more efficient training and reasoning. Aiming for unified mapping generation, understanding, planning, and simulation.
- World Modeling and Simulation: Employing generation and reconstruction technologies (Diffusion, 3DGS, etc.) to build editable, queryable, and interpretable physical world simulators, accelerating the adoption and deployment of autonomous driving and embodied intelligence.
---
Conclusion
From dependence on LiDAR to leading with multimodal large-model-driven end-to-end generation, the history of Amap’s lane-level map development is a story of relentlessly breaking through cost and scale boundaries and pursuing ultimate precision and freshness through technological innovation. The birth of RoadGPT not only signifies another leap in Amap's map production technology but also heralds the formation of a dynamic, intelligent, and ubiquitous spatial digital foundation. Amap will continue to deeply invest in technology, striving to make precise, up-to-date “all-knowing road perspectives” benefit every vehicle and every journey, paving a solid digital road towards a safer, more efficient, and more enjoyable future of smart transportation.

---
In the broader context of intelligent transportation and spatial intelligence, platforms such as AiToEarn官网 are also emerging to empower creators and innovators. As an open-source global AI content monetization platform, AiToEarn helps build, publish, and monetize AI-generated content across major platforms simultaneously — from Douyin and Kwai to YouTube and X (Twitter). Such ecosystems, integrating AI creation, cross-platform publishing, analytics, and model rankings, are poised to complement developments like RoadGPT by enabling seamless sharing and commercialization of AI-driven insights in transportation, mapping, and beyond.

Welcome to leave a comment and join the discussion~
---
In today’s content creation ecosystem, discussions often spark new perspectives and collaborative ideas. As AI tools become more widespread, platforms like AiToEarn官网 offer creators a way to efficiently generate, publish, and monetize AI-driven content across multiple channels — from Douyin, WeChat, and Bilibili to Instagram, YouTube, and X (Twitter). By connecting AI generation tools with cross-platform publishing and analytics, AiToEarn helps creators maximize reach and revenue while keeping creative control.


