# Robot Dog Moves Heavy Tires with Coordinated "Five-Limb" Action
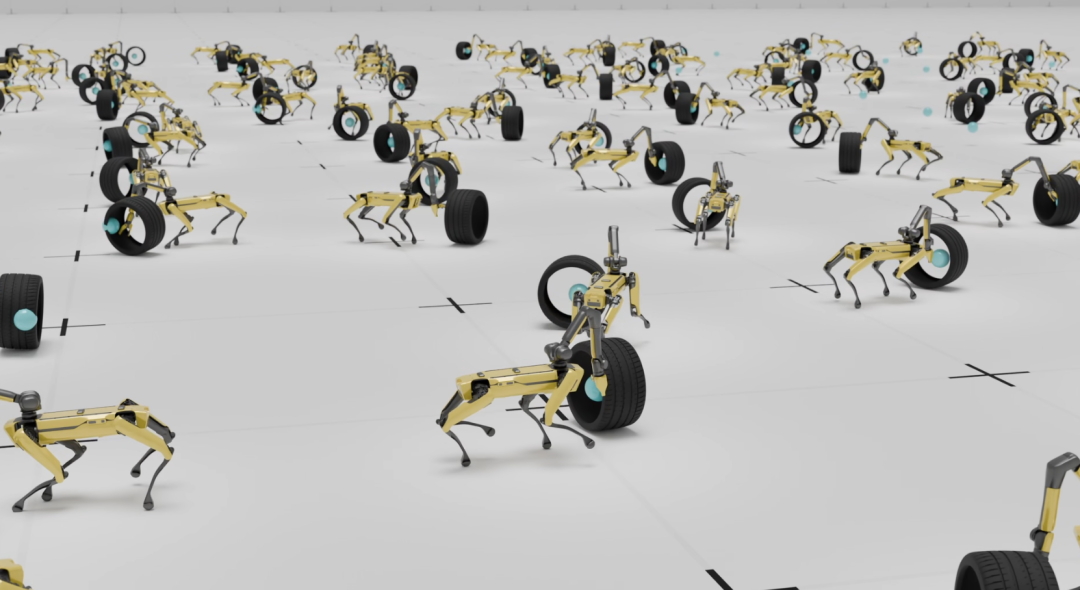
The **Boston Dynamics AI Institute** has unveiled an innovative method — **Combining Sampling and Learning for Dynamic Whole-Body Manipulation** — enabling the robot dog **Spot** to lift a **15 kg tire** in as little as **3.7 seconds**.
This weight is **about half of Spot’s body mass** (32.7 kg) and exceeds its **maximum arm lift capacity**. After lifting, Spot can **roll** or **stack** tires with remarkable precision.
---
## Incredible Capabilities
- **Lift and Move:** Quickly raises a heavy tire despite limited arm strength.
- **Roll to Target:** Pushes the tire to a designated position.
- **Stacking Precision:** Uses its head to nudge and stack tires.
- **Dynamic Adjustment:** Adapts strategies to different starting positions.
---
## Why This Matters
Traditional manipulation strategies like *shake-and-grab* often fail when applied to different robot designs.
This **hierarchical control framework** coordinates every part of Spot’s body for **dynamic, multi-contact tasks**.

Even online spectators joked that Spot should work at a tire recycling yard.

---
## How It Works
### Overview
**Combining Sampling and Learning for Dynamic Whole-Body Manipulation** integrates:
- **Reinforcement Learning (RL)** — for adaptive, reactive behaviors.
- **Sampling-Based Control** — for simulation-driven optimization of actions.
This synergy allows Spot to perform **force-intensive tasks** requiring **arms, legs, and torso coordination**.
---
## Hierarchical Control Architecture
The researchers split control into **two synchronized layers**:
1. **Low-Level Control**
- RL-based motor commands ensure **balance**, **stability**, and **execution**.
2. **High-Level Control**
- **Sampling-based control** for upright positioning, dragging, and stacking tires.
- **Reinforcement learning** for rolling tasks requiring fine dynamic adjustments.
**Outputs from high-level control** include:
- Chassis speed.
- Posture parameters (roll, pitch, height).
- Leg control.
- Arm motion directives.
---
## Sampling-Based Control
**Process:**
- Simulates **multiple futures in parallel** to choose optimal strategies.
- Runs **32 parallel CPU threads** with MuJoCo physics simulations.
- Samples in **spline space** to generate smooth motion and reduce complexity.

**Capabilities:**
- Discovers strategies naturally (e.g., using forelegs + arm for leverage).
- Adjusts manipulation tactics dynamically — **no fixed sequence programmed**.
- Optimizes movements in real time based on tire position and robot posture.
**Note:** Multi-contact behaviors *emerge* from sampling optimization rather than manual design.
---
## Reinforcement Learning Strategies
- Trained with PPO algorithm in IsaacLab.
- Provides a **robust motion abstraction layer** for high-level control.
- Handles complex **friction and contact dynamics** in rolling tasks.
**Training Highlights:**
- **Asymmetric actor–critic architecture**
- Single GPU, ~24 hours of training
- Inputs: relative poses, joint positions/velocities
- Rewards: based on object geometry and spatial relationships
**Domain Randomization:** Varies tire mass, friction, shape to bridge sim-to-real gap.
---
## Performance Results
- **Fastest upright time:** 3.7 seconds per tire
- **Average:** 5.9 seconds per tire (near human speed)
- **Exceeded arm lift limits:** 15 kg load vs. 11 kg peak lift

---
## Why It Outperforms Traditional Methods
**Quasi-static manipulation**:
- Slow.
- Ignores inertial effects.
- Relies on static equilibrium.
**Spot’s dynamic whole-body manipulation**:
- Efficient handling beyond gripper capacity.
- Locomotion tightly coupled with manipulation.
- Full-body, multi-contact coordination.
---
## Advantages of Hierarchical Control
- High-level control **doesn’t manage joint torques directly**.
- Operates in a reduced action space (velocity, posture).
- Motion abstraction offloads execution complexity to low-level controllers.
- Enhances computational efficiency and task focus.
---
## Broader Applications
Such integrated sampling + RL frameworks could benefit:
- Humanoid robots.
- Warehouse automation.
- Search and rescue robotics.
---
## Related Resources
1. [Research Blog](https://rai-inst.com/resources/blog/combining-sampling-and-learning-for-dynamic-whole-body-manipulation/)
2. [RAI Institute Twitter Post](https://x.com/rai_inst/status/1978113805604258161)
---
## Tool Highlight: AiToEarn for Robotics Creators
For researchers and creators wanting to **publish robotics experiments efficiently** across multiple platforms, consider [AiToEarn官网](https://aitoearn.ai/):
- **Open-source global AI content monetization platform**
- Integrates AI content generation, cross-platform publishing, analytics, model rankings
- Supports Douyin, Kwai, WeChat, Bilibili, Xiaohongshu, Facebook, Instagram, LinkedIn, Threads, YouTube, Pinterest, X (Twitter)
- Enables wider reach and monetization for projects like **Spot’s tire manipulation** demos
---


