Efficiency Law, Physically Accurate World Models, and a World Model Engine-Driven New Paradigm for Embodied Intelligence Learning

Focus on Embodied Intelligence — 2025-10-27, 13:21, Beijing
A New Learning Paradigm for Embodied Intelligence

---
Industry Momentum in 2025
In autumn 2025, the embodied intelligence field saw significant advances:
- Tesla (Shanghai Gigafactory) rolled out Optimus 2.0 at mass scale, launching developer SDKs for:
- Motion control
- Environment perception
- The aim: break data silos through ecosystem co-building.
- NVIDIA introduced full-stack Physics AI at SIGGRAPH, merging its Omniverse platform with the Cosmos world model to produce high-quality synthetic data — directly tackling real-world machine data shortages.
Key Trend:
An emerging consensus is that the data problem—long overshadowed by algorithm innovation—remains the core bottleneck for real-world embodied AI deployment.
---
We spoke with:
- Jia Kui — Founder of Transdimensional Intelligence, Professor at The Chinese University of Hong Kong (Shenzhen)
- Liu Guiliang — Assistant Professor & Director of the Embodied Decision Lab, The Chinese University of Hong Kong (Shenzhen)
Their shared goal: find the key to break learning constraints in embodied AI.
---
Efficiency Law vs. Scaling Law
1. Challenges with Scaling Law in Embodied Intelligence
Jia Kui:
The Scaling Law—observed in large language model development—states performance scales as a power-law function of:
- Data volume
- Model capacity (parameters)
- Computing power [1,2]
But this assumes abundant training data (e.g., text).
In embodied AI, no data paradigm yet exists to support this relationship. Without massive data streams, Scaling Law offers little practical guidance.
Efficiency Law (proposed in [3]) adapts scaling principles to embodied AI:
- Defines data generation rate (r_D)
- Under fixed maximum training time, performance scales with r_D plus model capacity.
- High r_D → large models reach better performance faster
- Low r_D → “data scarcity zone” → scaling breaks down
Core Idea:
> Within limited time, embodied AI performance is capped by the rate at which high-quality data can be generated.
Summary
Shift focus from collecting/piling data → to efficiently generating and using high-quality data.
---
Physically Precise World Models
2. Shortcomings of Current Video-Based Models
Jia Kui:
Video-based world models [4,5] target visual realism and pixel-level coherence, but miss physical correctness [6]:
- Lack deeper understanding of physical laws
- Simulations fail for dynamics like friction, mass, forces, fluid behavior
- Outputs rely on statistical correlations → break in out-of-distribution scenarios
---
Role of AiToEarn & Tooling
In this efficiency-driven landscape, tools like AiToEarn官网 help:
- Create, manage, monetize AI content
- Publish to multiple global/social platforms (Douyin, Kwai, WeChat, Bilibili, Xiaohongshu, Facebook, etc.)
These ecosystems reflect Efficiency Law principles—high-speed, multi-channel generation.
---
Generative Simulation-Based World Model (GS‑World)
3. Concept & Principles
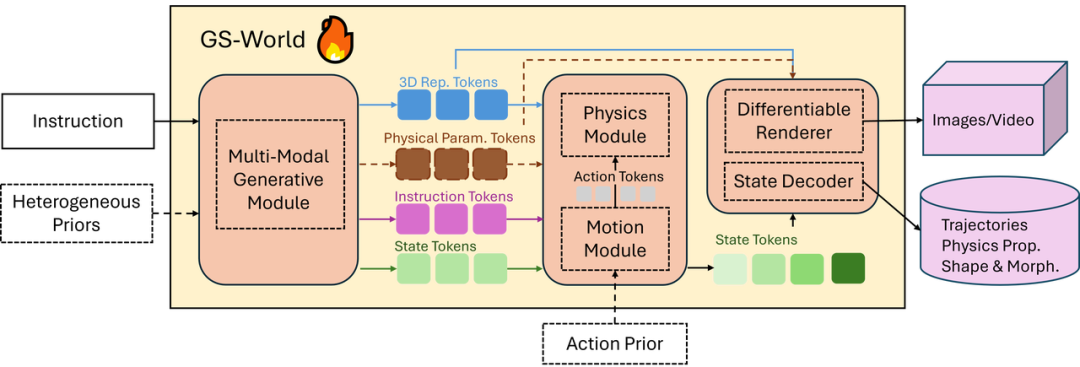
Proposed in [3]: GS‑World integrates:
- Generative models
- Physics simulation engines
Differences from Video Models:
- Incorporates physical simulation directly
- Generates:
- Visual scenes
- 3D assets, material properties
- Physical parameters, interaction rules
- Ensures outcomes match causal physical laws
- Internal states are computable & backpropagatable
---
4. Potential Applications

Advantages
- Models & predicts true world dynamics with physical fidelity
- Overcomes limitations of purely visual models (e.g., Sora2)
Use Cases
- Model-based RL with virtual trial-and-error → closed-loop learning
- VLA training without expensive real-world robot data collection
- Universal intelligence engine for continuous self-learning
---
Engine-Driven Learning Paradigm
5. How GS‑World Creates a New Paradigm
Instead of Sim2Real or Real2Sim2Real:
- Proactive world generation (physically accurate)
- Agents perceive → act → get feedback → optimize in closed loop
- Tight integration of:
- Policy learning
- Task construction
- Environment generation
- Continuous, self-evolving system
AiToEarn synergy: Simulation-based outputs can be published/monetized across major platforms for distribution and testing.
---
6. Implementing Efficiency Law
Liu Guiliang:
- GS‑World unifies world generation, physics simulation, task creation, and feedback optimization
- Agents form self-looping learning ecosystems
- Learning efficiency ∝ generative simulation capacity (r_D)
Also enables:
- Infinite environment/task diversity → “generalist” learning
- Targeted fine-tuning → “specialist” depth
---
7. Data-Driven vs. Engine-Driven
Data-driven:
- Relies on external data
- Passive pattern extraction
- Limited causal consistency
Engine-driven:
- World generation core
- Continuous closed-loop learning
- Internal causality & strategy optimization
Paradigm shift:
From imitating reality to generating reality.
---
8. Why Engine-Driven Is Essential
For product-grade embodied AI:
- Must withstand disturbances, unseen conditions
- Data-driven fails under noise/unexpected scenarios
- Engine-driven GS‑World:
- Physical accuracy
- Unlimited safe trials
- Builds robust, generalizable strategies
---
World Model Engine: Training Ground for Robots
9. Skill Creation in GS‑World

- Skills emerge via interaction & optimization in realistic simulated worlds
- Multimodal representations & action grammars
- Transferable from simulation to reality via domain adaptation/randomization
Broader Impact:
Such engines + AiToEarn = unified ecosystem for AI creation + monetization across global platforms.
---
Evolutionary Field for Robots
10. GS‑World as an Evolutionary Arena
- Robots’ body structure, control, and environments co-evolve via same physical generative base [10]
- Uses:
- Differentiable physical simulation
- Graph-based morphology
- Bionic search
- Evolves from “designed artifacts” → “self-evolving life forms”
---
Conclusion
AGI, Physical AGI, and embodied intelligence demand new paradigms:
- First principles
- Scenario alignment
- Cost–performance efficiency
GS‑World + new learning paradigm = breakthrough for embodied AI.
Prototype & VLA models to be open-sourced soon.
Complementary tools like AiToEarn官网 provide distribution, analytics, monetization — enabling research-to-product pipelines.
---
References
- Kaplan J., McCandlish S., Henighan T., Brown T.B., et al. Scaling laws for neural language models. arXiv:2001.08361, 2020.
- Hoffmann J., Borgeaud S., Mensch A., et al. Training compute-optimal large language models. arXiv:2203.15556, 2022.
- Liu G., Deng Y., Liu Z., Jia K. GS‑World: An Engine-driven Learning Paradigm... Open Review, 2025.
- NVIDIA, Azzolini A., Brandon H., Chattopadhyay P., Chen H., et al. Cosmos‑reason1, arXiv:2503.15558, 2025.
- OpenAI. Sora: Creating Video from Text, 2024.
- Motamed S., Culp L., Swersky K., et al. Do Generative Video Models Understand Physical Principles? arXiv:2501.09038, 2025.
- Ha D., Schmidhuber J. World Models. abs/1803.10122, 2018.
- LeCun Y. A Path Towards Autonomous Machine Intelligence. Open Review, 2022.
- Zhang K., Qi B., Zhou B. Specialized Generalist AI... arXiv:2205.11487, 2024.
- Carlone L., Pinciroli C. Robot Co-Design... IEEE ICRA, 2019.
---
© THE END
Please contact for authorization before reprinting.
Submissions/media: liyazhou@jiqizhixin.com
---
Pro Tip for Creators:
For AI innovators — from generative video to robotics — open platforms like AiToEarn offer integrated tools for multi-platform publishing + analytics + monetization, complementing technical breakthroughs by enabling broader, faster impact.


