NeurIPS 2025 Spotlight | GeoSVR: New Potential of Sparse Voxels — High-Precision 3D Surface Reconstruction Beyond the 3DGS Series
2025-10-13 12:18 — Beijing
More Accurate, More Complete, Faster!

---
Background: The Challenge of High-Quality Surface Reconstruction
In computer vision and graphics, surface reconstruction has long been a core challenge.
The question: Given a set of multi-view images, can we recover a high-precision, geometrically clear, detail-rich 3D model?
Recent innovations like NeRF, SDF, and 3D Gaussian Splatting have made great strides, allowing AI to reconstruct the three-dimensional world from images. Yet, as these approaches mature, some bottlenecks remain:
- Initialization Dependency
- 3DGS is efficient but heavily relies on high-precision point cloud initialization. Flaws here cause direct geometric errors and missing details.
- Blurred Boundaries
- Gaussian primitives have inherently soft edges, making sharp, consistent geometry difficult.
- External Priors Integration Difficulties
- Depth or normal cues can help, but naïve integration often introduces noise, degrading otherwise accurate geometry.
Question: Is there a new path that avoids complex initialization, achieves accuracy and completeness, and preserves efficiency?
---
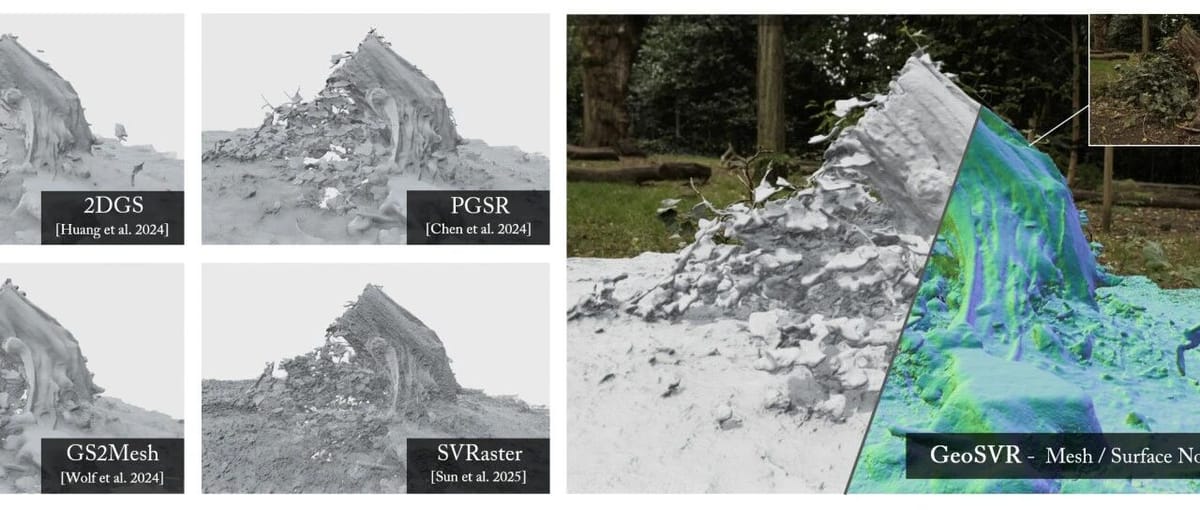
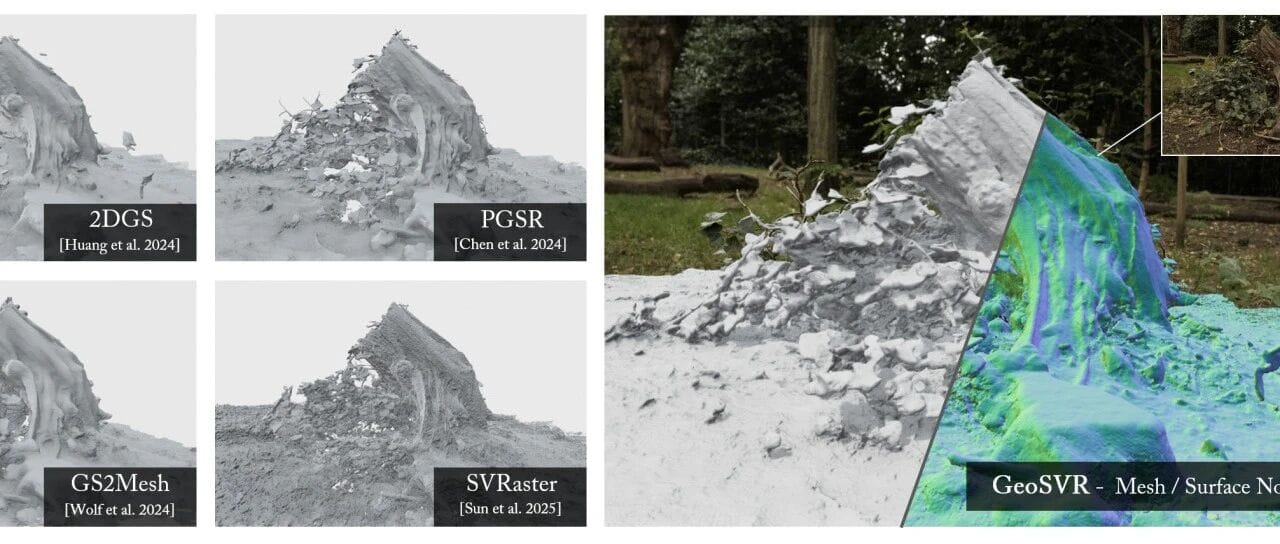
Introducing GeoSVR
A collaborative team from Beihang University’s Baixiao Group, Rawmantic AI, Macquarie University, RIKEN AIP, and The University of Tokyo proposes GeoSVR (Geometric Sparse Voxel Reconstruction) – a new explicit geometric optimization framework utilizing sparse voxels for:
- State-of-the-art geometric accuracy
- Fine detail capture
- Scene completeness
The paper is a Spotlight at NeurIPS 2025 and the project is open source.
- Paper: arxiv.org/abs/2509.18090
- Project page: fictionarry.github.io/GeoSVR-project/
- Code repository: github.com/Fictionarry/GeoSVR
---
Core Methodology: Two Key Designs to Harness Sparse Voxels
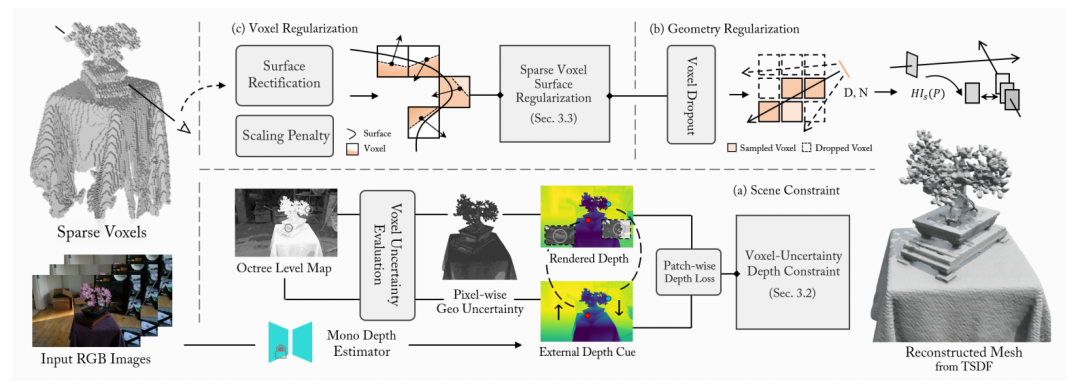
Figure 1. GeoSVR Pipeline
Built upon the sparse voxel representation (SVRaster), GeoSVR introduces geometric constraints and surface regularization to produce efficient, accurate surfaces.
---
1. Voxel-Uncertainty Depth Constraint
Challenge:
Sparse voxels with no strong geometric prior often generate local surface errors. External depth (e.g., monocular estimation) is noisy, and direct use can degrade geometry.
Solution:
Model geometric reliability before applying depth constraints, estimating uncertainty per voxel and adjusting supervision strength.
Steps:
- Uncertainty Modeling
- Hierarchy-aware: uncertainty tied to voxel octree level.
- Low-level voxels (larger scale) with critical features have higher uncertainty.
- Weighted Depth Constraint
- Combine depth loss with uncertainty estimates.
- Ambiguous areas → rely more on external cues.
- Trusted areas → primarily photometric self-learning.
Effect:
Stable, selective constraint application, minimizing overfitting to noisy priors.
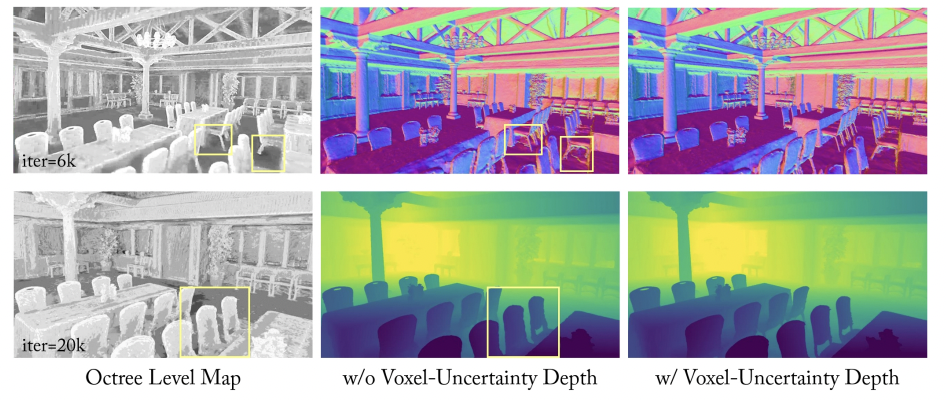
Figure 2. Effect of Voxel Uncertainty Depth Constraint
---
2. Sparse Voxel Surface Regularization (SVSR)
Challenges:
- Discrete representation → local overfitting and fragmented surfaces.
- Misalignment between rendered and true surfaces.
- Large voxels dominating geometry → distortion.
Strategies:
a) Voxel Dropout
- Randomly omit some voxels during training.
- Forces global scene consistency with fewer voxels.
- Reduces overfitting and local minima.
b) Surface Correction
- Detect ray–voxel intersections.
- Force rendered surfaces to align with voxel density boundaries.
- Produces sharper and more accurate geometric edges.
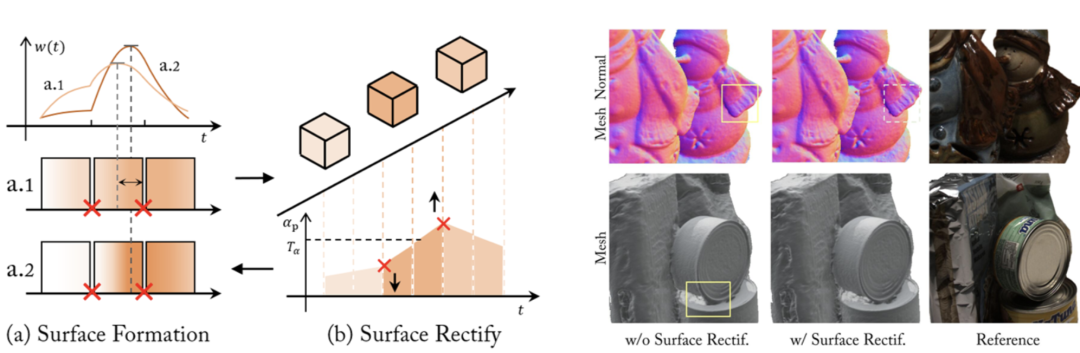
Figure 3. Effect of Surface Correction
c) Voxel Scale Penalty
- Penalizes excessively large voxels.
- Prevents large voxels from smoothing over local structures.
Outcome:
SVSR improves precision, sharpness, and optimization stability through global consistency and scale control.
---
Experimental Results: Performance Breakdown
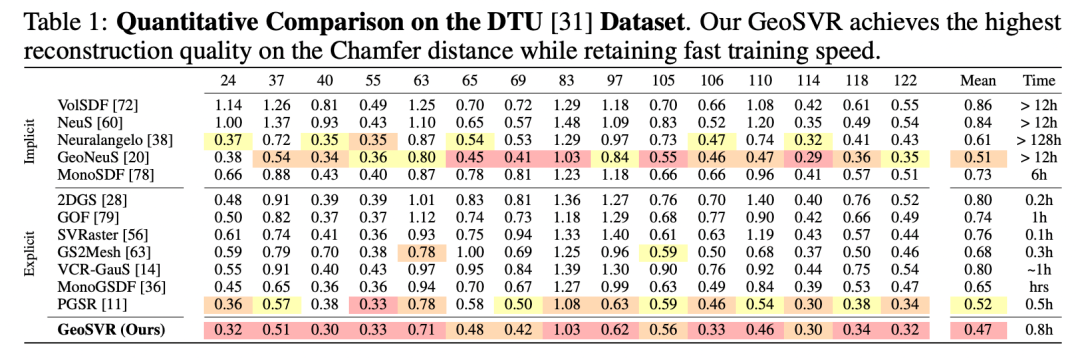
1. DTU Dataset
- Chamfer distance surpasses prior SOTA.
- Highly realistic reconstructions.
- Training time: only 0.8 hours vs. >12 hours for implicit methods.
---
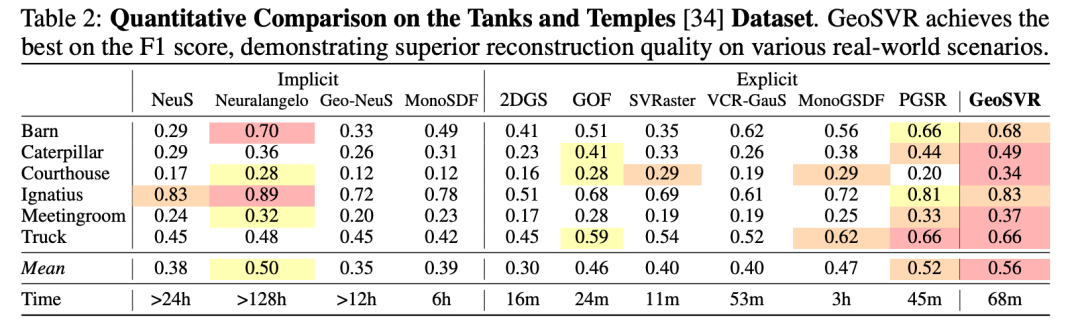
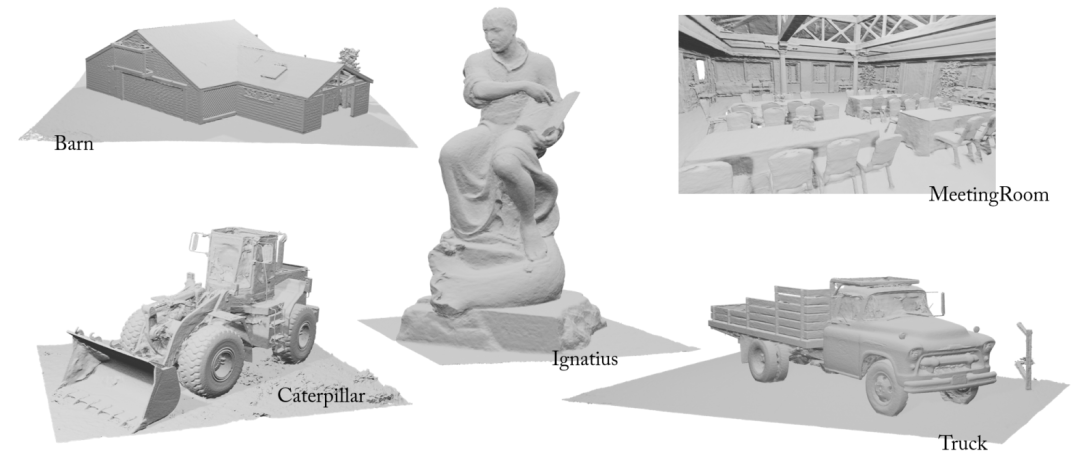
2. Tanks and Temples
- Achieves 0.56 F1-score — current highest precision.
- Stable reconstruction even in complex/low-texture regions.
---
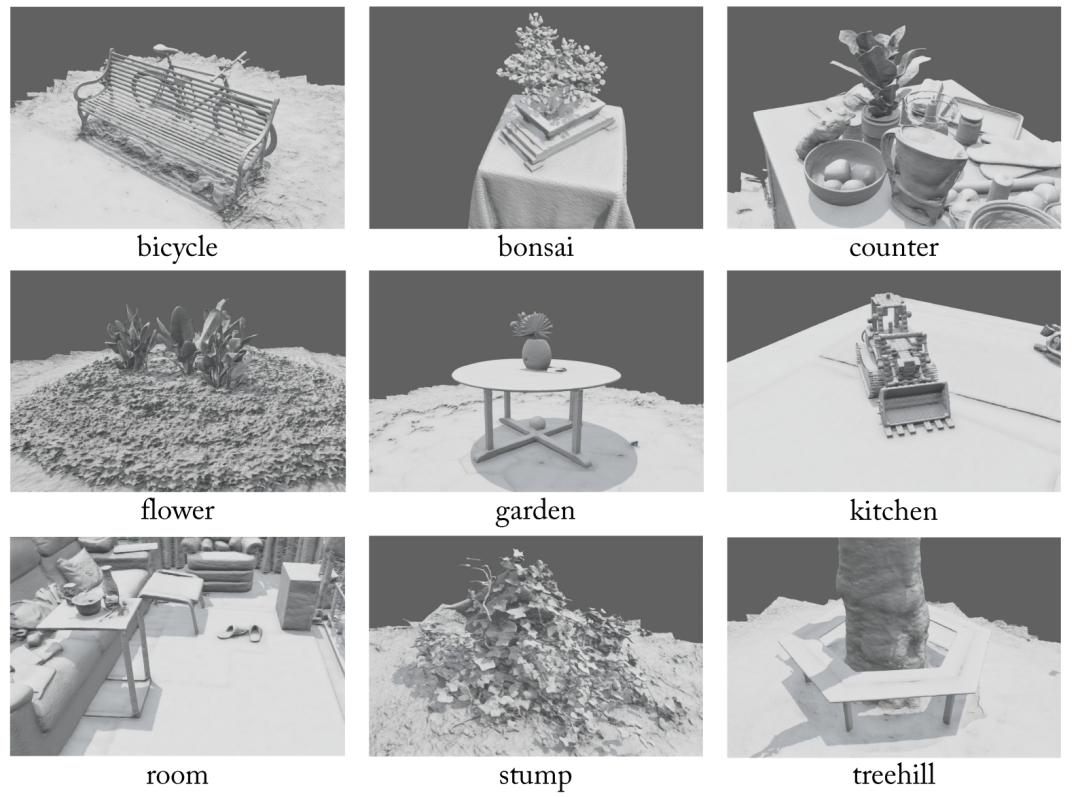
3. Mip-NeRF 360
- Comparable high fidelity to 3DGS in novel view synthesis.
- Improved geometric completeness and detail.
---
Key Findings:
- More Accurate: Notable precision boost.
- More Complete: Surpasses detail/completeness of prior work.
- Faster: Efficiency matches 3DGS, vastly outperforms implicit models.
---
Significance & Future Directions
GeoSVR demonstrates that sparse voxels can achieve high-quality surface reconstruction — beyond SDF and 3DGS.
By combining uncertainty-based constraints with regularization, it balances:
- Precision
- Completeness
- Efficiency
Applications:
- Robotics perception
- Autonomous driving
- Digital twins
- Virtual reality
Next Steps:
Scaling to larger scenes and handling complex light-path conditions.
---
For Creators & Research Teams
AI-assisted platforms like AiToEarn官网 can help bring innovations like GeoSVR to wide audiences.
Features include:
- Open-source monetization of AI content
- Cross-platform publishing (Douyin, Kwai, WeChat, YouTube, LinkedIn, X/Twitter)
- Integrated AI generation tools
- Analytics and AI模型排名
---
© THE END
For reprints: Contact this official account for authorization.
Media inquiries: liyazhou@jiqizhixin.com
---
If you’d like, I can now produce a concise single-page version of this Markdown for researchers who need quick project overviews. Would you like me to do that?

