# COLA: Sensor-Free Human–Robot Collaboration
*(Still, it has to be college students who know how to have fun — doge!)*
---
## A Robot Sidekick with Campus Energy
While casually surfing the web, I stumbled upon something fascinating:
A male college student has a **robot teammate** — and it’s *incredibly clingy* (well, sort of~).
**Scenes from their day:**
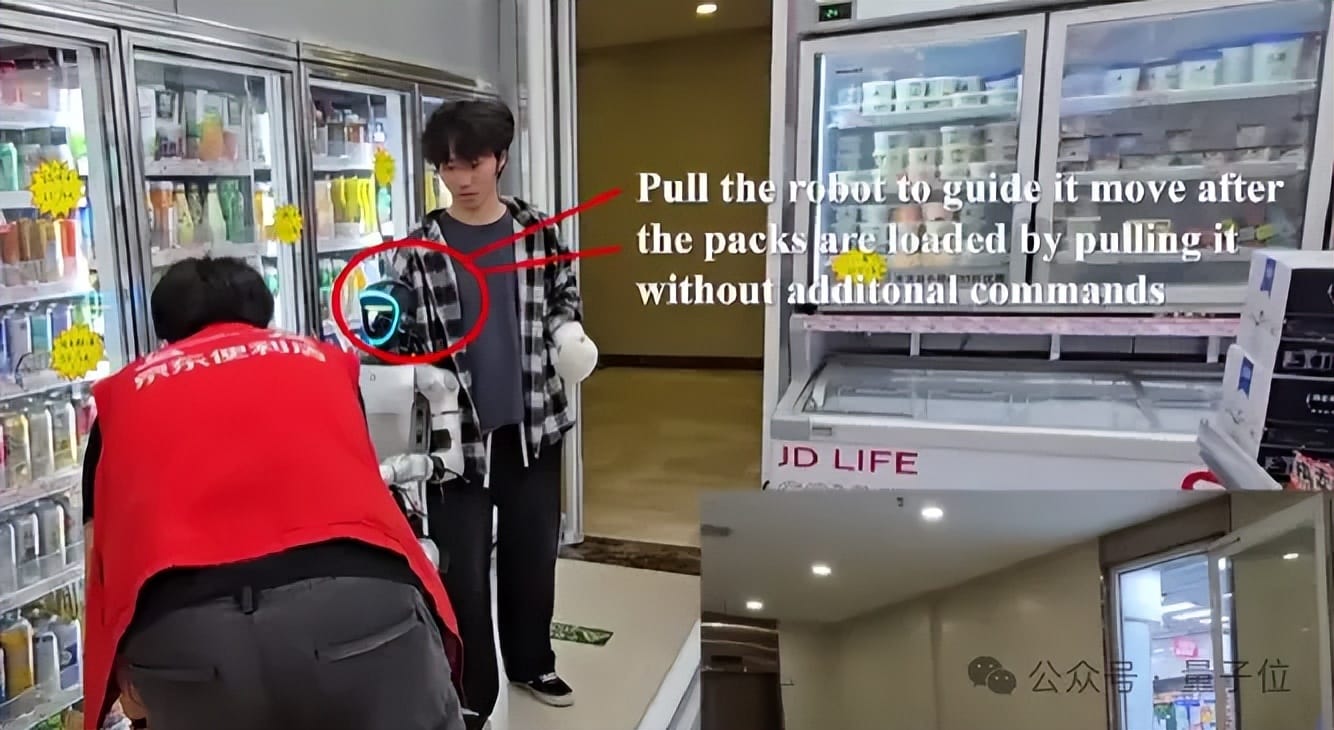
1. **Morning Supermarket Shift**
The robot follows him around during part-time supermarket work — once goods are packed, it happily pulls the cart and navigates stairs with ease:

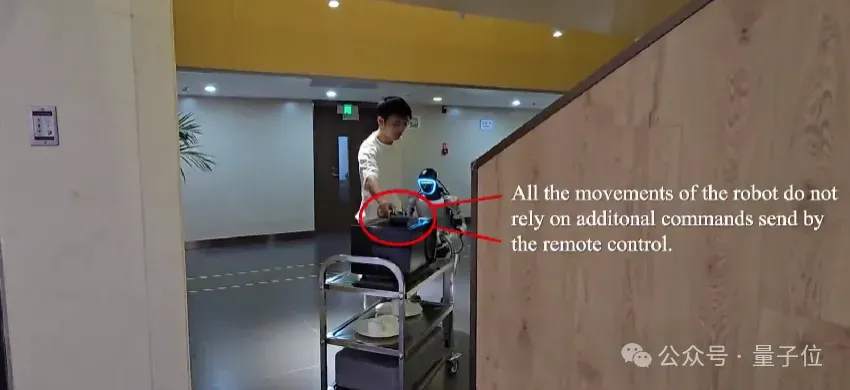
2. **Noon Campus Cafeteria**
It helps push the meal cart, instantly reacting to simple gestures — a pat on the head means *stop*:
3. **Post-Work Workout**
After a long day, the robot even joins him for exercise:
4. **Vlog Potential**
Imagine filming from the robot’s perspective: *“A High-Energy Robot’s Day”*:
---
## The Unusual Interaction Method
Did you notice? All interaction is done via **patting its head** or **tugging its body**.
No remote control. **No voice commands**.
---
## From Fun to Research
Turns out, this is part of a legitimate high-tech research project — complete with a published academic paper:
---
## The Problem They’re Tackling
**Scenario:** *Human–robot collaborative object carrying*
- For robotic arms: Well researched and validated.
- For humanoid robots: Lacks deep exploration.
**Challenge:**
Humanoids have **complex whole-body dynamics** — coordinating torso, limbs, joints, maintaining balance, and handling diverse environmental factors.
**Goal:**
Enable **seamless human–humanoid collaboration** for moving varied objects.
---
## Their Solution: COLA
### Overview
**COLA** is a novel reinforcement learning method that operates **without cameras, LiDAR, or external sensors**, relying purely on **proprioception**.
---
### Key Design Philosophy
#### 1. Unified Collaboration Policy
- Traditional: Separate “robot-leading” & “human-leading” modes → causes lag.
- **COLA merges roles into *one policy***:
- Steady human force → robot follows.
- Human hesitation or instability → robot leads & stabilizes.
- No manual input — roles switch fluidly.
- Even tasks like carrying heavy items upstairs become smooth:
---
#### 2. Dynamic Closed-Loop Training
- Training environment simulates unpredictable events:
- Sudden movement changes.
- Shifts in object weight.
- Grip slips.
- Focus: Real-world robustness.
---
#### 3. Continuous Feedback Loops
- Robot’s actions alter the environment → environment changes influence next decisions.
- Mirrors actual human–robot transport dynamics.
---
## Why COLA’s Approach Is Different
**COLA’s Core Advantage:**
Operates purely through *intrinsic perception* — internal data:
Joint angles, actuator force feedback, position/velocity info.
**Benefits:**
- Immune to environmental interference (e.g., poor lighting).
- Eliminates remote controls.
- Reduces hardware costs and system complexity.
---
### Technical Steps
1. **Residual Teacher Fine-Tuning**
- Train base movement policy.
- Add a *Residual Teacher* for cooperative carrying adjustments.
- Merge into a unified collaboration strategy.
2. **Simulation Training & Knowledge Distillation**
- Run millions of safe simulation episodes.
- Train a strong “teacher” model.
- Distill knowledge into a lightweight “student” policy for real robots.
---
### Predictive Insights
COLA implicitly predicts:
- **Object movement trend** (tilting risk, direction).
- **Human intent signals** (turning, force adjustment needs).
**Result:**
Load balance via coordinated trajectory planning.
---
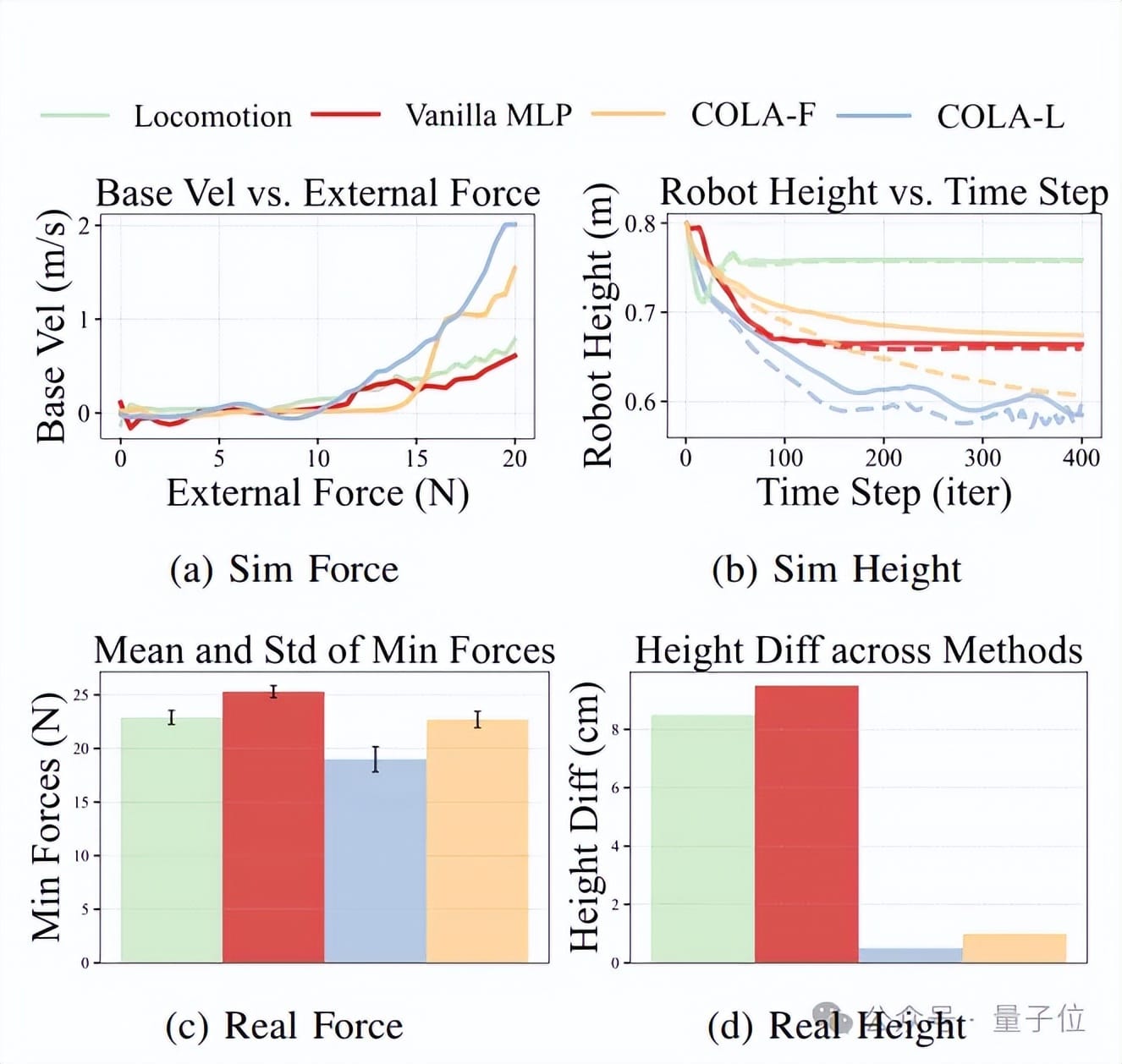
## Experimental Validation
**Simulation Results:**
- Outperformed explicit goal estimation & Transformer-based methods in:
- Movement precision (velocity, angular velocity, height error).
- Lower human effort (average external force).
- **Leader-oriented COLA-L** > **Follower-oriented COLA-F**.
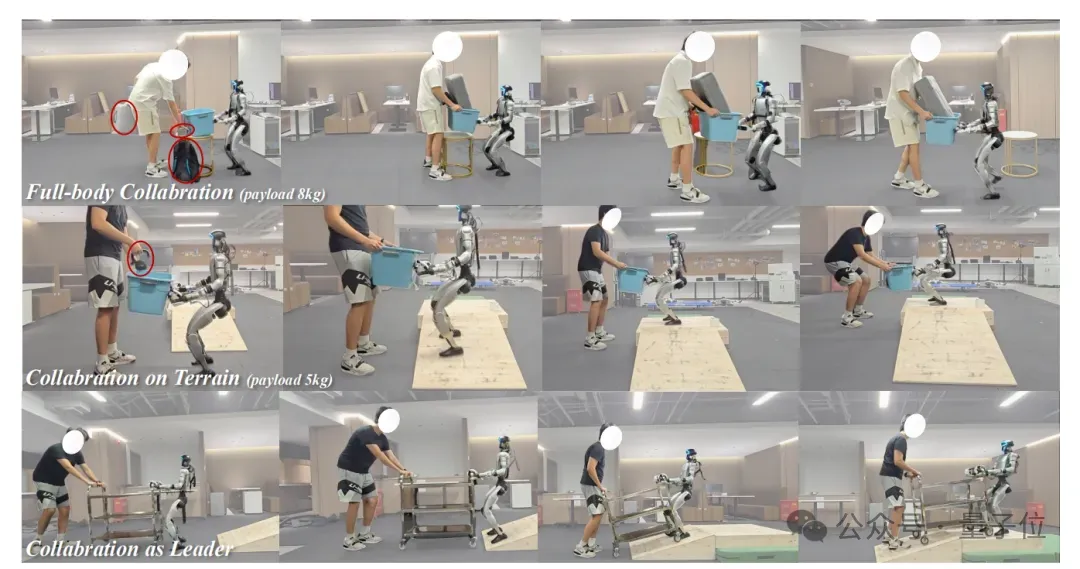
**Real-World Tests:**
- Objects: Boxes, flexible stretchers.
- Patterns: Straight walking, turning.
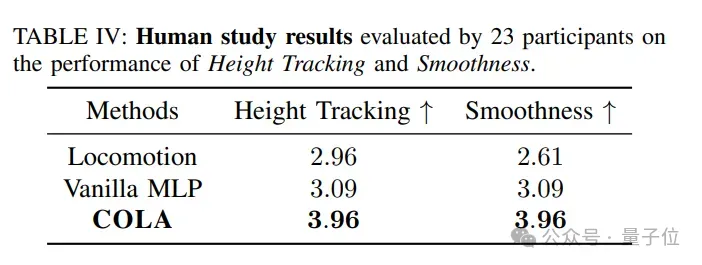
**Human Trials:**
- 23 participants.
- COLA rated **highest in tracking accuracy & smoothness**.
---
## The Team Behind COLA
### Co-First Authors
- **Yushi Du** – Dept. of EEE, University of Hong Kong.
- **Yixuan Li** – Ph.D., Beijing Institute of Technology; interests in humanoid robotics.
---
### Corresponding & Senior Authors
- **Baoxiong Jia** – Research scientist, Beijing Institute for General AI; Peking Univ. & UCLA alumnus; multiple 2025 conference papers.
- **Wei Liang** – Professor, BIT; heads PIE Lab; focuses on computer vision & VR.
- **Yanchao Yang** – Asst. Professor, University of Hong Kong; specialties in embodied intelligence.
- **Siyuan Huang** – Director, Center for Embodied AI & Robotics; teaches at Peking Univ.; worked at DeepMind, Facebook Reality Labs.
---
### Other Contributors
- **Yutang Lin** – Third-year student, Peking University.
- **Pei Zhou** – Ph.D. student, University of Hong Kong.
---
## Potential for Creators
Sensor-free collaboration like COLA opens new storytelling opportunities.
AI-powered content platforms such as [AiToEarn官网](https://aitoearn.ai/) can:
- Generate AI-driven content.
- Publish across Douyin, Instagram, YouTube, etc.
- Track and monetize engagement via integrated analytics.
More info: [AiToEarn开源地址](https://github.com/yikart/AiToEarn).
---
## References
- **Paper:** https://www.arxiv.org/abs/2510.14293
- **Project Homepage:** https://yushi-du.github.io/COLA/
- **Social Reference:** https://x.com/siyuanhuang95/status/1980517755163185642
---
**What do you think?**
---